Register your team for FRE 2021 by filling out the registration form on our website (through the Event tab in the menu above).

Register your team for FRE 2021 by filling out the registration form on our website (through the Event tab in the menu above).
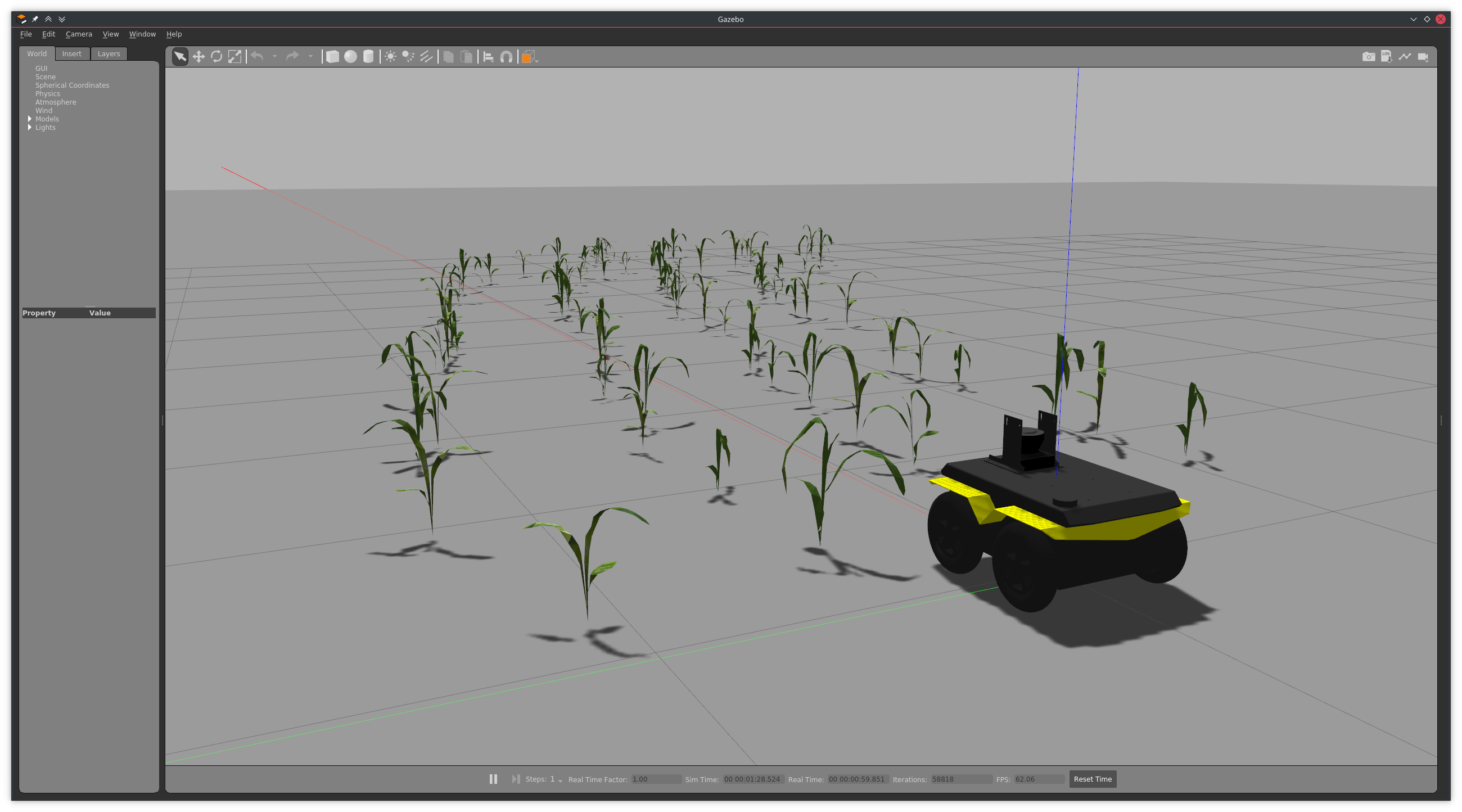
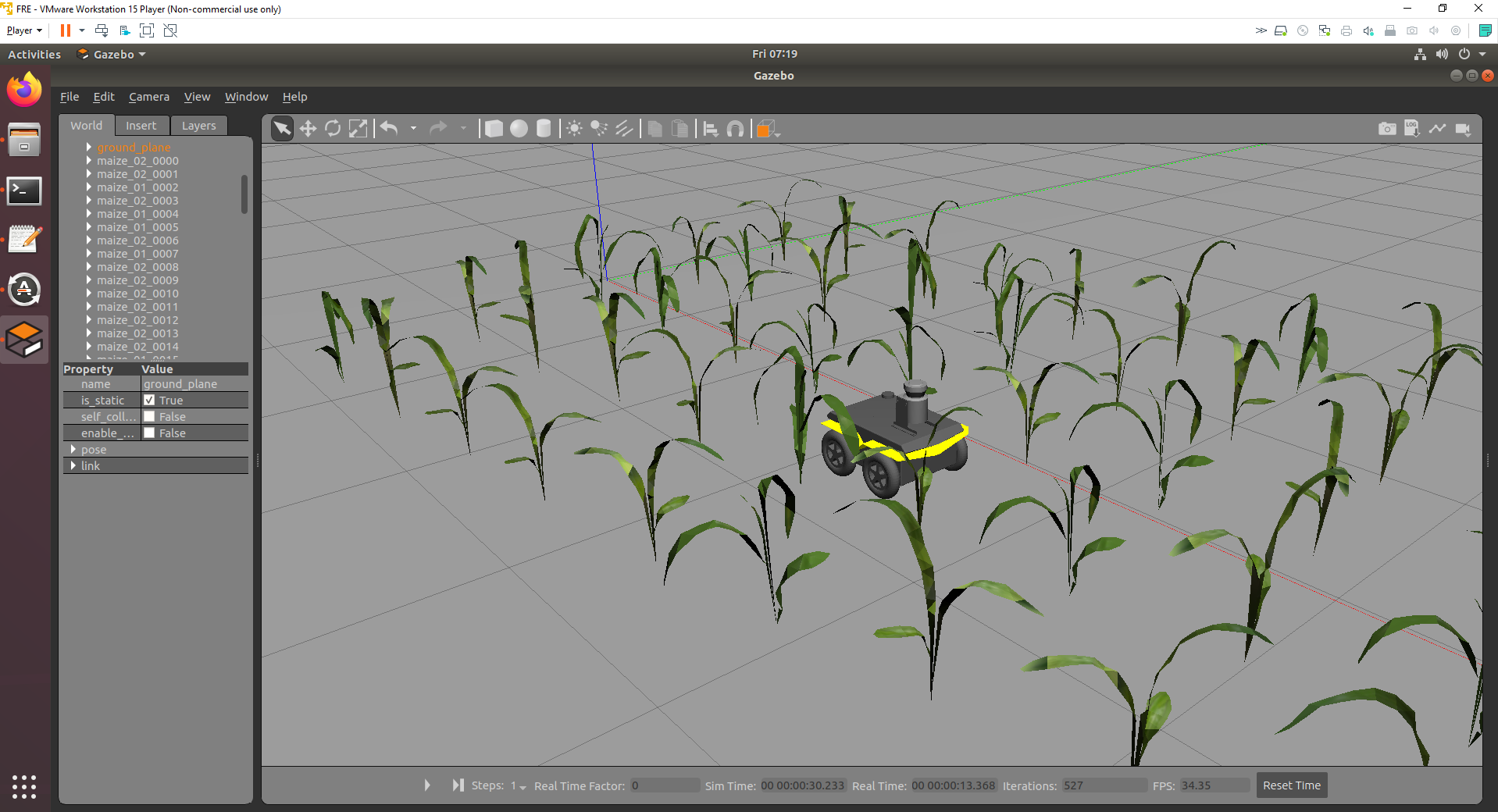
Check our GitHub! New versions of the virtual environment have been released with improvements for each task.
A digital Field Robot Event poses some serious challenges but also brings new opportunities. Due to the digital nature of a virtual event, we can now easily collaborate internationally.
Since today Kamaro engineering, a well-known participant of the Field Robot Event, is contributing to the development of the digital simulation environment. Kamaro engineering already made some beautiful 3D meshes of real maize plants (see picture).
We, as Field Robot Event organisation, are very enthusiastic about this collaboration and we would love to see this field robot community grow. If you have questions, ideas, or want to help with the digital environment, contact us using the discussion thread in the git repository.

Register your team for FRE 2019 by filling out the registration form on our website (through the Event tab in the menu above).
The Field Robot Event shows a vision of the future of modern precision agriculture. Right now, a small revolution is taking place. A new breed of robots will soon be able to carry out a variety of tasks in row crops, such as weeding, spraying and disease monitoring. Agricultural robots working in a field, completely autonomous: the Field Robot Event proves this is possible!
We invite students, professionals and other participants to enter our annual international open-air field robot contest: the only open-air agricultural field robot contest in the world.
The contest allows unlimited creativity: no restrictions apply to the robot design and construction. As we have seen during the previous Field Robot Events, our participants know how to be creative!
The Field Robot Event includes a contest, of course, but exchanging experiences and networking are an important part of the program, too. Everyone who is interested in robots is welcome to come and enjoy the Field Robot Event!