2.1 General description
For this task, the robots are navigating autonomously through a real maize field, like in first part of task 1, but skipping every second row. In addition to this, the robots must treat the plants when the plants are present and stop the treatment, where the plants are not present.
In optimal conditions, the robots should start spraying the plants on their left and right side. If plants are missing on one side, the robot should stop spraying on that side until it does not detect new plants on that side. In addition, the robot should stop spraying when it reaches the end of the row and starts the turning procedure. In real world, the robots might run out of water or might not even have the capabilities to spray. Therefore, the robots must be equipped with two indicators / bright lights, turning on and off in accordance to the presence of plants.
For the contest, the spraying medium will be water.
2.2 Rules for robots
Each robot must start after a starting indication (acoustic signal) within 1 min. The maximum
available time for the run is 3 min.
2.3 Points distribution
There will be 10 areas in the field where the plants will be missing approx. 1 m long empty rows, distributed on one or possibly both sides. So, in total, 10 m of plants will be missing. The points will be awarded according to the number of successfully detected empty regions Smissing), with a weight set to 1, and the total distance travelled (Stravelled).
Sfinal [m] = 10 * weight * Smissing [m] * + Stravelled [m]
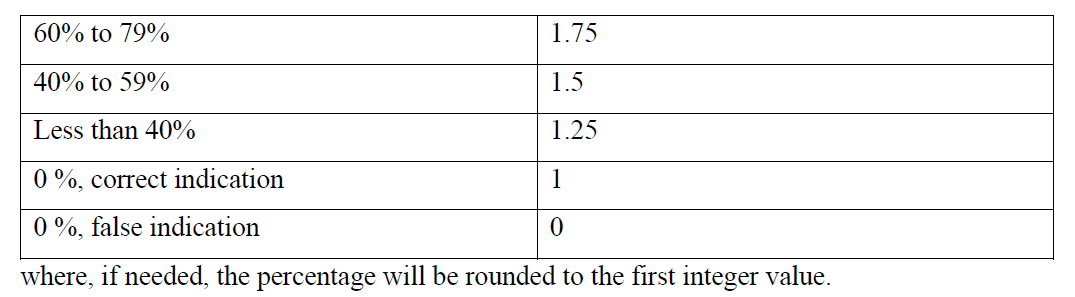
A bonus factor will be awarded to the robots, that will actually spray the plants. To evaluate this, water sensitive paper (WSP) will be placed on dry wooden planks and these wooden planks will be placed on the ground where the plants are missing(*1). The WSPs will be positioned one in every 10 cm and based on the number of wet WSPs the weight will be set as follows:

* 1 The wood plank with WPS will be positioned close to the last plant. If this first WSP will be wet, the weightswill be applied. If the robot indicates the area with missing plants, but fails to spray (as it pobbrably ran out of water) and the WSPs are all dry, the weight will be set to 1.
* 2 Pay attention to drift from the previous rows as it might ruin the results.
Crop plant damage by the robot will result in a penalty of 2% of total row length distance in meter per damaged plant. (Example: 10 rows x 10 m = 100 m max. distance, means a penalty of 2 m per damaged plant.)
In case the robot fails to detect the plants in the middle of row where the plants are not missing, evident as the robot will stop spraying and / or the light indicator will turn off, this will result in penalty points as in the case of damaged plants (e. g. one damaged plant per one false positive
action) 3*.
3* Some robots might be quite accurate to detect where the plants are and where there are just (small portions) of leaves present. This might result in constant on / off spraying situation in areas where the plants are present. In order to avoid penalty points, the teams are advised to keep spraying / indicator on until the next plant (if present).