Remark: The organisers tried to describe the tasks and assessments as good and fair as possible, but all teams should be aware of that we might need to modify the rules before or even during the contest. These ad hoc changes will always be decided by the jury members and cannot beyond disputed.
The organisers expect that the event is held in an “Olympic Manner”. The goal is a fair competition, without any technological or procedural cheating or gaining a competitive advantage by not allowed behaviours and technologies. Any observed or suspected cheating should be made public immediately to ensure fairness for all. The jury members are obliged to act always as neutrals. All relevant communication will be in English. For pleasing national spectators in the country where the event is organised, the contest moderation could partly switch to the host language.
All participating teams must contribute to the event proceedings with an article describing the machine and software in more details and their ideas behind it or development strategies in general. This publication is perceived well within our agricultural robot community. Furthermore, this shall document the state-of-the-art and make it easier for new teams to come to the event and being able to cope with the challenges. Increasing knowledge and skills for developing and operating agricultural robots is an overall aim of the event.
Furthermore, each registered team must provide an introductory video of max. 2 min time about team, machine, strategy, institution and country. This will be shown during the contest as well as for the FRE website.
General Rules
Competition environment and conditions
The competition will be conducted virtually in a simulation of ROS Gazebo. It is an open-source 3D robotics simulator. Gazebo supports codes for sensor simulation and actuator control. It provides realistic rendering of environments including high-quality lighting, shadows, and textures. It can model sensors that “see” the simulated environment, such as laser range finders, cameras (including wide-angle), Kinect style sensors, etc. Gazebo has been used as the simulation environment for a number of technology challenges and competitions like DARPA Robotics Challenge, NASA Space Robotics Challenge, Virtual RobotX Competition and others* .
The operating system and ROS version used are fixed to avoid compatibility problems (Ubuntu 18.04, ROS-melodic).
There will be a specific competition environment provided for each task. Furthermore, for the development and testing of the robot software there will be environments published via links on the FRE webpages that already give an impression about the challenges and features in each task. The final and beforehand not published contest environments will vary (!) but will be in principle the same as the test environments. Their specific properties will be defined by the organisers.
A machine model for the tasks 1 and 2 to be used by all teams will be provided by the organisers. It is compulsory for the teams to use this machine and model in task 1 and 2. This requirement shall ensure fair conditions for all teams, because the focus shall be on controller software including sensing and converting perception information into robot navigation or motion. For the other tasks 3, 4 and 5 the teams are welcome to use their own virtual and real machines but teams are also welcome to use an extension of the standard model.
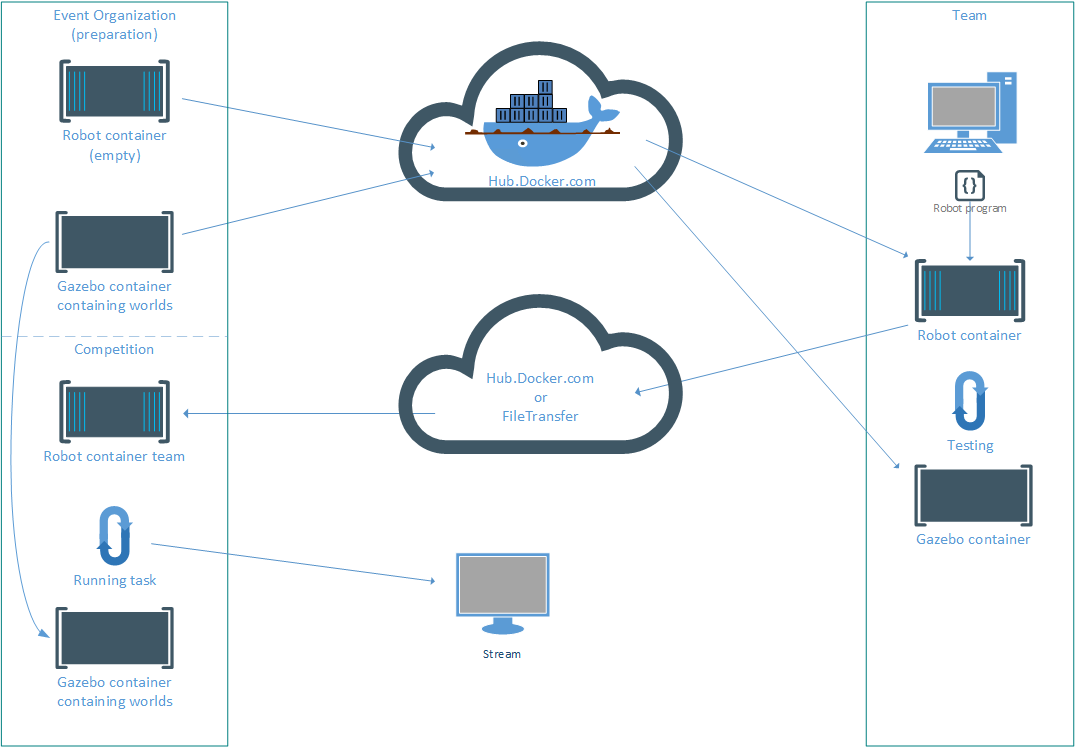
Prior to the contest the organisers distribute Docker containers. One to run the competition environments in a Gazebo simulation, another to integrate teams robot code to. (picture 1 at the end of this text) These two containers communicate, allowing just the exchange of sensor messages and speed commands.
During the contest teams must have uploaded their robot container to the organisers one hour before the task starts. The organisers need this time to prepare for the setup of the task run.
During conduction of the task the teams robot container will communicate with the original Gazebo container. Object position information provided by gazebo will be blocked and cannot be used for the competition.
Five tasks will be prepared to challenge different abilities of the robots e.g. in terms of positioning, navigating, sensing and actuating in a direct or indirect relation to agricultural applications.
The scoring, ranking and awarding will always be team and not machine related. Teams are not allowed to come with more than one machine or code per task.
The simulated crop plants in the environments will be maize with a mean height of 30 – 40 cm and leaves pointing to random directions from plant to plant – each plant might look different or even be dynamic in terms of random leave motion. There will be 11 rows of equal length. The mean row width will be 75 cm (varying 70-80 cm) and mean intra-row spacing 16.7 cm (plant density 8 plants/m2). The plant spacing within the rows will also realistically vary.
The drive paths of the robots shall be between the crop rows and not above rows.
The use of GNSS sensor packages is not allowed except for the Free Style Task 5. The focus for the other tasks in terms of localisation shall be on relative positioning and related sensor-based behaviours.
General robot requirements
Autonomous Mode
All robots must act autonomously in all tasks, including the freestyle, if possible. Therefore, teams cannot interact with their machines during the run.
There will be an automatic stop of the gazebo environment (freezing) after the run duration (e.g. 3 or 5 min). During the run there will be a screen display of distance and errors e.g. number of damaged plants. This shall also make it more exiting for the participants and the spectators. The final assessment or conclusion about e.g. penalty will be done by the jury.
Positioning and starting
Before the start the robot is placed in front of the beginning of the first and second row. The starting point will be a marked with a white line. No part of the robot is allowed to cross the white line at the start position. After the start signal, the robot must start within one minute. If the robot does not start within this time, it will get a second chance after all other teams finished their runs.
Start & Stop and Second Trial
There will be no possibility for the teams to use a stop button intervention during the run. But it is up to the teams to decide once to stop within the first row or within the first 30 secs of run. A new start e.g. with a slightly different starting position or orientation has to follow immediately.
Scoring and awards
The performance of the competing robots will be assessed by an independent expert jury. Beside measured or counted performance parameters, also creativity and originality will be evaluated (e.g. task 5 free style). There will be an award for the first three ranks of all task 1 to 5, but only task 1 to 4 together will yield the overall competition winner. For the overall competition ranking points will be given as follows:
Rank 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 etc.
Points 30 28 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 etc.
Participation results in at least 1 point for the given task. No participation results in 0 points. If two or more teams have the same number of points for the overall ranking, the team with the better placements during task 1 to 4 will be ranked higher. There will be no negative point sum e.g. due to penalties during the task runs.
