
RowBo is developed by a student team of Wageningen University. Detailed information
can be found on our website: www.RowBo.tk.
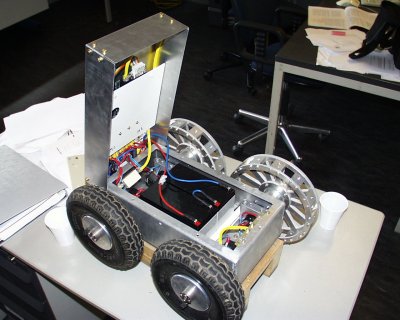
The RowBo chassis is built from aluminum. This chassis had been used for the
Field Robot Events of 2003 and 2004 as Agrobot 2 and Challanger respectively.
Because our team is building forward on this chassis we didn't need to build
one ourselves. The steering is done by skid steering. All four wheels are connected
to their own DC motor. We are testing if tracks will work on our robot. If not
than we stick to normal wheels as used in the previous Field Robot Events. The
power source are two serial connected 12V lead acid batteries.
Sensor technology
For driving between the crop rows ultrasonic and infrared sensors are used.
For turning at the end of the rows a webcam and an electronic compass are used.
Intelligence technology
On top of the chassis a plastic box will arise with all the electronics. The
top level intelligence is a Epia Mini ITX mother board of 600 Mhz. This computer
communicates with the lower level intelligence via the RS232 communication protocol.
One of these lower levels is a Basic Atom chip. The Basic Atom is used for sampling
the ultrasonic and infrared sensors. Another lower level is a RoboteQ AX3500
motor controller. This motor controller has two DC output channels (on for each
side of the robot, because of the skid steering). The speed of the motors is
controlled with PID closed loop control with PWM (pulse width modulation) and
optical encoders.